#include <FreeEnergyRestrain.h>
Public Member Functions | |
| ADiheRestraint () | |
| void | PrintInfo () |
| virtual Bool_t | TwoTargets ()=0 |
| virtual double | GetDiheTarget1 ()=0 |
| virtual double | GetDiheTarget2 ()=0 |
 Public Member Functions inherited from ARestraint Public Member Functions inherited from ARestraint | |
| ARestraint () | |
| virtual | ~ARestraint () |
| int | GetNumGroups () |
| void | SetKf (double Kf) |
| double | GetKf () |
| void | SetLambdaKf (double LambdaKf) |
| void | SetLambdaRef (double LambdaRef) |
| double | GetLambdaKf () |
| double | GetLambdaRef () |
| void | SetGroup (AGroup &Group, int GroupIndex) |
| void | SetGroups (AGroup &Group1) |
| void | SetGroups (AGroup &Group1, AGroup &Group2) |
| void | SetGroups (AGroup &Group1, AGroup &Group2, AGroup &Group3) |
| void | SetGroups (AGroup &Group1, AGroup &Group2, AGroup &Group3, AGroup &Group4) |
| void | UpdateCOMs (GlobalMasterFreeEnergy &CFE) |
| void | DistributeForce (int WhichGroup, AVector Force, GlobalMasterFreeEnergy &CFE) |
| virtual AVector | GetGradient (int WhichGroup)=0 |
| virtual double | GetEnergy ()=0 |
| virtual void | GetStr (char *Str)=0 |
| virtual Bool_t | IsForcing () |
| virtual double | Get_dU_dLambda () |
| virtual void | SetRefPos (AVector) |
| virtual void | SetRefDist (double) |
| virtual void | SetRefAngle (double) |
| virtual void | SetBound (Bound_t) |
| virtual void | SetLowerAngle (double) |
| virtual void | SetUpperAngle (double) |
| virtual void | SetIntervalAngle (double) |
| virtual void | SetStartPos (AVector) |
| virtual void | SetStopPos (AVector) |
| virtual void | SetStartDist (double) |
| virtual void | SetStopDist (double) |
| virtual void | SetStartAngle (double) |
| virtual void | SetStopAngle (double) |
Protected Member Functions | |
| double | GetE (double RefDihe, double Const) |
| AVector | GetGrad (int WhichGroup, double RefDihe, double Const) |
| AVector | gradU (AVector &P1P2P3, AVector &P4P5P6, AVector &dP1, AVector &dP2, AVector &dP3, AVector &dP4, AVector &dP5, AVector &dP6) |
| Protected Member Functions inherited from ARestraint | |
| double | GetAngle (AVector &A, AVector &B, AVector &C) |
| double | GetDihe (AVector &A, AVector &B, AVector &C, AVector &D) |
| void | EarlyExit (const char *Str, int AtomID) |
Additional Inherited Members | |
| Protected Attributes inherited from ARestraint | |
| double | m_Kf |
| int | m_NumGroups |
| AGroup * | m_pGroups |
| AVector * | m_pCOMs |
| Static Protected Attributes inherited from ARestraint | |
| static double | m_LambdaKf = 1.0 |
| static double | m_LambdaRef = 0.0 |
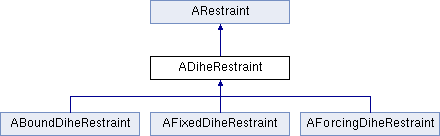
Detailed Description
Definition at line 146 of file FreeEnergyRestrain.h.
Constructor & Destructor Documentation
◆ ADiheRestraint()
| ADiheRestraint::ADiheRestraint | ( | ) |
Definition at line 537 of file FreeEnergyRestrain.C.
References ARestraint::m_NumGroups, ARestraint::m_pCOMs, and ARestraint::m_pGroups.
Member Function Documentation
◆ GetDiheTarget1()
|
pure virtual |
Implemented in AForcingDiheRestraint, ABoundDiheRestraint, and AFixedDiheRestraint.
Referenced by PrintInfo().
◆ GetDiheTarget2()
|
pure virtual |
Implemented in AForcingDiheRestraint, ABoundDiheRestraint, and AFixedDiheRestraint.
Referenced by PrintInfo().
◆ GetE()
|
protected |
Definition at line 587 of file FreeEnergyRestrain.C.
References ARestraint::GetDihe(), and ARestraint::m_pCOMs.
Referenced by AFixedDiheRestraint::GetEnergy(), ABoundDiheRestraint::GetEnergy(), and AForcingDiheRestraint::GetEnergy().
◆ GetGrad()
|
protected |
Definition at line 606 of file FreeEnergyRestrain.C.
References ASSERT, AVector::cross(), AVector::Dist(), AVector::dot(), ARestraint::GetDihe(), gradU(), kAlmostMinusOne, kAlmostOne, ARestraint::m_pCOMs, and AVector::Set().
Referenced by AFixedDiheRestraint::GetGradient(), ABoundDiheRestraint::GetGradient(), and AForcingDiheRestraint::GetGradient().
◆ gradU()
|
protected |
Definition at line 693 of file FreeEnergyRestrain.C.
References AVector::Dist(), and AVector::dot().
Referenced by GetGrad().
◆ PrintInfo()
|
virtual |
Implements ARestraint.
Definition at line 547 of file FreeEnergyRestrain.C.
References endi(), ARestraint::GetDihe(), GetDiheTarget1(), GetDiheTarget2(), iout, kPi, ARestraint::m_pCOMs, and TwoTargets().
◆ TwoTargets()
|
pure virtual |
Implemented in AForcingDiheRestraint, ABoundDiheRestraint, and AFixedDiheRestraint.
Referenced by PrintInfo().
The documentation for this class was generated from the following files:
